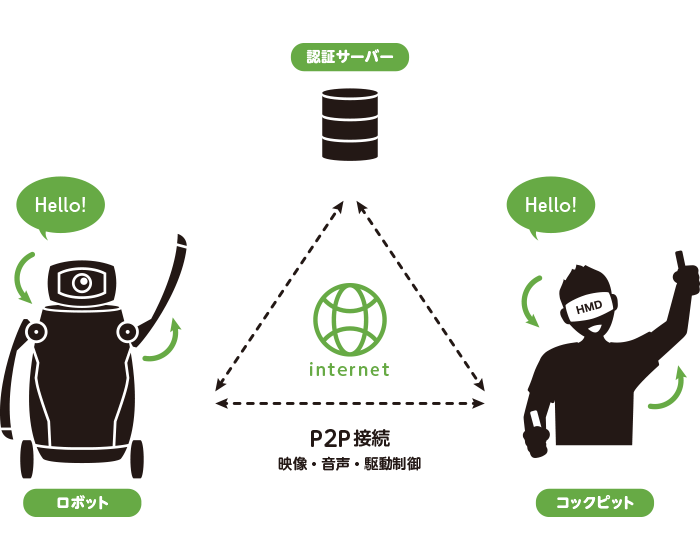
概要|システム構成図
ロボットは、操縦者へ臨場感を伝達させるための【入力装置】と、操縦者の意思を表現する【出力装置】で構成されます。操縦者はロボットの入出力装置を最適に操作/受信するための【ウェアラブル装置】を装着します。また【入力装置】、【出力装置】、【ウェアラブル装置】は「映像、音声、制御の信号をプラグインにて簡単に実現する仕組み(特許出願中)」で接続され、更にロボットと操縦者は、いつでもスイッチで切り替えられるように【サーバ】で監視制御します。
- 【入力装置/ロボット】
- ・視覚は採光率の高いステレオカメラ
- ・聴覚は立体的に集音する指向性マイク
- 【出力装置/ロボット】
- ・頭部や腕を円滑に作動させるDCモータ
- ・環境音に負けないスピーカ、アンプ
- 【ウェアラブル装置/コックピット】
- ・頭部の動きを感知するジャイロユニット付きヘッドマウントディスプレイ
- ・腕の動きをエンコードするアーム型コントローラ
- ・立体音声を復元するヘッドフォンとマイク
- 【サーバ】
- 起動したロボットやコントローラのIDを認証し操縦者の求めに応じて任意のロボットに接続を処理する